rviz的简单使用
本文共 658 字,大约阅读时间需要 2 分钟。
原链接:
运行测试平台:rviz是ros自带的一个图形化工具,可以方便的对ros的程序进行图形化操作。其使用也是比较简单。
整体界面如下图所示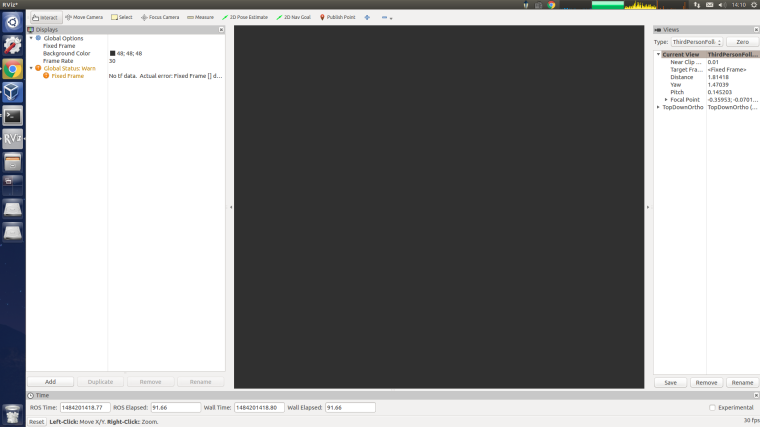
界面主要分为左侧的显示设置区域,中间的大的显示区域和右侧的视角设置区域。最上面是和导航相关的几个工具。最下面是ros状态相关的一些数据的显示。
下面以用rviz查看ORB_SLAM2的topic数据为例展示一下rviz的使用方法
启动ORB_SLAM程序
在终端依次输入
roscoreroslaunch ORB_SLAM2 map.launch
等待程序成功运行启动运行
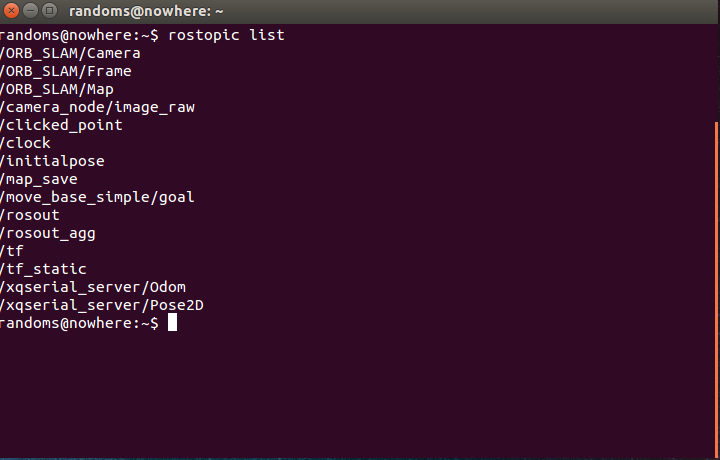
这时在终端输入rostopic list
看到如下的输出则说明程序已经成功启动了
添加topic进入rviz
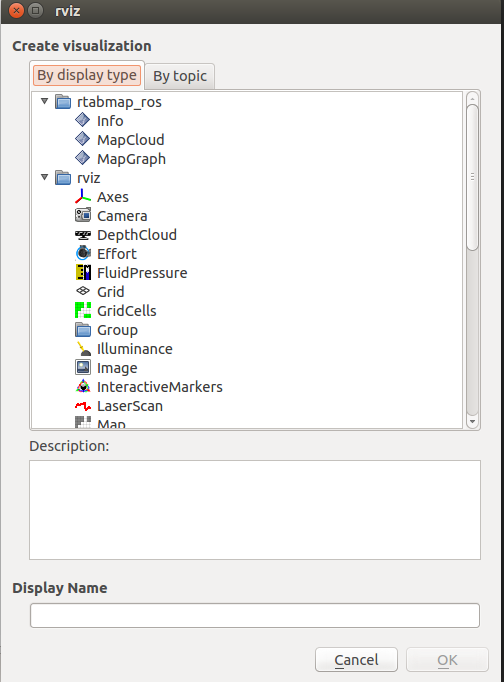 点击by topic,在下面的列表中选择ORB_SLAM相关的几个topic 这样就可以成功添加了
点击by topic,在下面的列表中选择ORB_SLAM相关的几个topic 这样就可以成功添加了 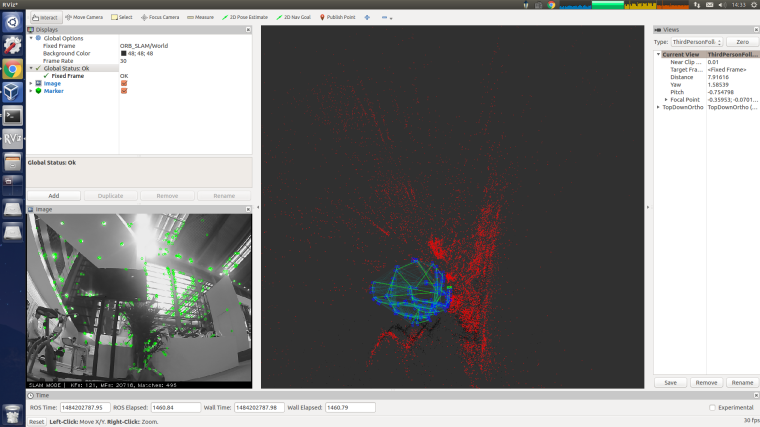
如果添加后出现如下图所示的错误
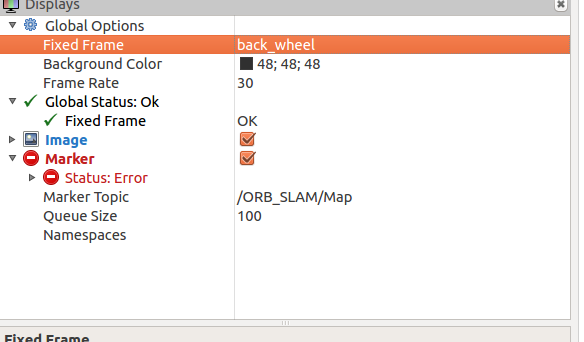 这是由于Glabal Options里面的坐标系设置有问题。将其改成对应的坐标系就可以了。
这是由于Glabal Options里面的坐标系设置有问题。将其改成对应的坐标系就可以了。 其他的各种topic都可以通过这种方式方便的进行添加。
基本操作
中间区域显示的ORB_SLAM程序计算出的三维点云。可以通过鼠标左键拖动进行视角的调整。具体的操作方式在最下面的状态栏里面有提示。
右侧区域可以对视角进行更详细的设置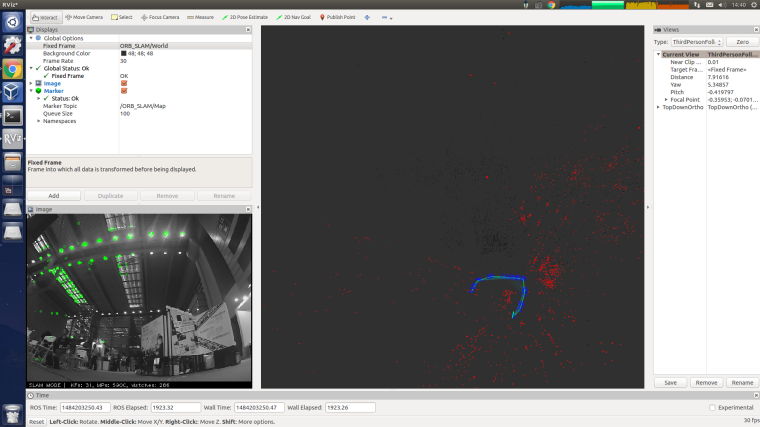
保存设置
在配置完成之后,如果不想以后每次都要进行一样的配置,可以把配置文件保存起来。
 在最上面的菜单中有保存的选项。
在最上面的菜单中有保存的选项。 更详细的rviz相关信息可以看官方的
转载地址:http://gfdvb.baihongyu.com/
你可能感兴趣的文章
我要学ASP.NET MVC 3.0(十一): MVC 3.0 使用筛选器
查看>>
ASP.NET MVC3、Pager 分页
查看>>
在 ASP.NET MVC 中创建自定义 HtmlHelper 控件
查看>>
MSDN---扩展方法 (C# 方法中的this参数)
查看>>
我要学ASP.NET MVC 3.0(十四): MVC 3.0 实例系列之创建数据表格
查看>>
我要学ASP.NET MVC 3.0(十五): MVC 3.0 实例系列之表格的排序
查看>>
我要学ASP.NET MVC 3.0(十七): MVC 3.0 实例之表格中数据的筛选
查看>>
Displaying a Sorted, Paged, and Filtered Grid of Data in ASP.NET MVC
查看>>
C#中的操作符
查看>>
ADO.NET Ling to Sql 语法
查看>>
ASP.NET MVC 2博客系列之一:强类型HTML辅助方法
查看>>
详解Asp.net MVC DropDownLists
查看>>
Asp.net MVC防止图片盗链的实现方法,通过自定义RouteHandler来操作
查看>>
VS2010的智能提示没有了的可能原因
查看>>
Creating a Cascading Dropdown in ASP.net MVC 3 and jQuery (1)
查看>>
创建联动的 DropdownList in ASP.net MVC 3 and jQuery (2)
查看>>
HTTP触发Jenkins参数化构建(CORS Plugin)
查看>>
来自 Serenity 的 Java 8 的一些使用技巧
查看>>
ubuntu12.04--子进程 已安装 post-installation 脚本 返回了错误号 1
查看>>
系统--电脑开机一声长响
查看>>